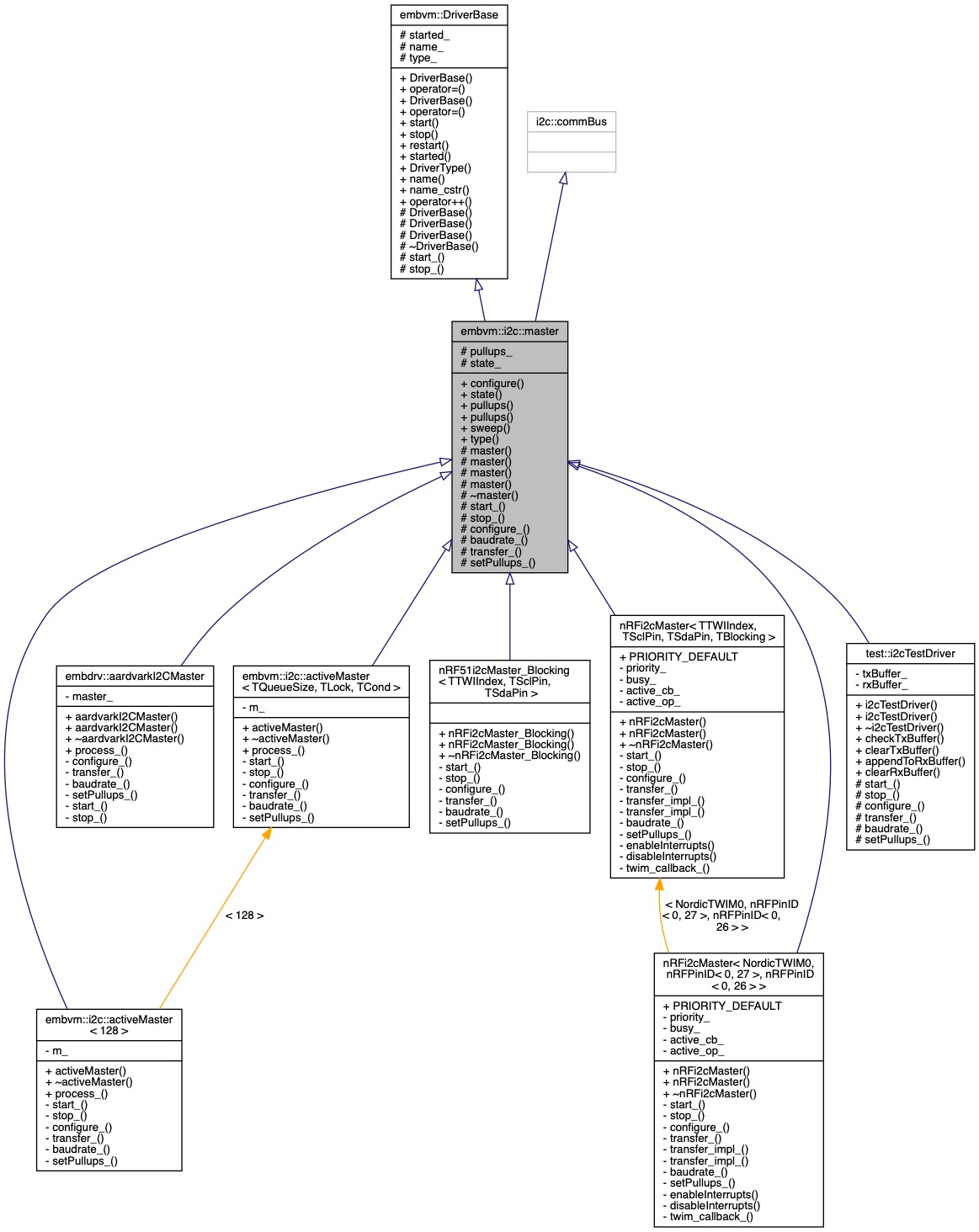
This class provides the I2C master interface definition. More...
#include <i2c.hpp>
Public Types | |
| using | cb_t = stdext::inplace_function< void(i2c::op_t, i2c::status)> |
| Represents the type of the callback operation. More... | |
| using | sweep_list_t = etl::vector< uint8_t, 128 > |
| using | sweep_cb_t = stdext::inplace_function< void(void)> |
Public Member Functions | |
| virtual void | configure (i2c::baud baud, i2c::pullups pull=i2c::pullups::external) noexcept |
| Configure the I2C bus. More... | |
| i2c::state | state () const noexcept |
| Check the I2C bus status. More... | |
| i2c::pullups | pullups (i2c::pullups pullups) noexcept |
| Configure pull-ups. More... | |
| i2c::pullups | pullups () const noexcept |
| Check the pull-up configuration. More... | |
| void | sweep (sweep_list_t &found_list, const sweep_cb_t &cb) noexcept |
| Perform an I2C bus sweep to identify active devices. More... | |
| void | start () noexcept |
| Start the driver. More... | |
| void | stop () noexcept |
| Stop the driver. More... | |
| void | restart () noexcept |
| Restart the driver. More... | |
| type_safe::boolean | started () const noexcept |
| Check if the driver has been started. More... | |
| constexpr embvm::DriverType_t | DriverType () const noexcept |
| Returns the registered type ID of the driver. More... | |
| constexpr const std::string_view & | name () const noexcept |
| Provides a string_view reference of the driver name. More... | |
| constexpr const char * | name_cstr () const noexcept |
| Provides a c-string version of the driver name. More... | |
| virtual DriverBase & | operator++ () noexcept |
| Increment operator is a no-op, but is used for iterator compatibility. More... | |
Static Public Member Functions | |
| static constexpr embvm::DriverType | type () noexcept |
| I2C Driver Type ID. More... | |
Protected Member Functions | |
| master (const i2c::commBus::DispatcherFunc &dispatcher=nullptr) noexcept | |
| Default constructor. More... | |
| master (const char *name, const i2c::commBus::DispatcherFunc &dispatcher=nullptr) noexcept | |
| Construct an I2C master with a C-string name. More... | |
| master (const std::string &name, const i2c::commBus::DispatcherFunc &dispatcher=nullptr) noexcept | |
| Construct a I2C master with a std::string name. More... | |
| master (const std::string_view &name, const i2c::commBus::DispatcherFunc &dispatcher=nullptr) noexcept | |
| Construct a I2C master with a std::string_view name. More... | |
| ~master () noexcept override | |
| Default destructor. More... | |
| void | start_ () noexcept override=0 |
| Derived classes override the start_ method to control driver-specific startup behavior. More... | |
| void | stop_ () noexcept override=0 |
| Derived classes override the start_ method to control driver-specific startup behavior. More... | |
| virtual void | configure_ (i2c::pullups pullups) noexcept=0 |
| Configure the I2C bus for operation. More... | |
| i2c::baud | baudrate_ (i2c::baud baud) noexcept override=0 |
| i2c::status | transfer_ (const i2c::op_t &op, const cb_t &cb) noexcept override=0 |
| virtual i2c::pullups | setPullups_ (i2c::pullups pullups) noexcept=0 |
| Configure pull-ups. More... | |
Protected Attributes | |
| i2c::pullups | pullups_ = i2c::pullups::external |
| Tracks the active pull-up configuration. More... | |
| i2c::state | state_ = i2c::state::idle |
| Tracks the status of the I2C bus. More... | |
| type_safe::boolean | started_ = false |
| Tracks the driver state. More... | |
| const std::string_view | name_ |
| Name of the driver instance. More... | |
| const embvm::DriverType_t | type_ |
| Type ID of the driver instance. More... | |
Detailed Description
This class provides the I2C master interface definition.
This class defines common interfaces and types for I2C master devices.
Implementing a i2c::master Driver
To implement your own I2C master device, simply inherit from this class type:
Derived classes must imlement the following pure virtual functions to complete I2C master behavior:
- configure_(), to configure the target hardware for operation
Derived classes must also implement pure virtual functions required by the comm bus, such as:
- transfer_(), which initiates a bus transfer
- baudrate_(), which configures the baudrate
Using a i2c::master Driver
i2c::master usage follows this general pattern:
- Declare a i2c::master device
- Configure the device
- Initialize a transfer
Declare a i2c::master device
Derived classes will have their own specific constructor schemes. In all cases you will use a derived class for the declaration.
Configure a i2c::master device
After the device has been declared, the object can be used to configure the I2C bus. Initial configuration will happen with the configure() function, which sets up the I2C device with the target baudrate and pull-up option.
Initialize a Transfer
All transfers require an op structure instance with the proper settings:
You should also prepare a callback function to handle the transfer completion:
To initiate a transfer, call transfer() with the op and callback:
When the transfer completes, the callback function will be called with a copy of the op struct and the result of the transfer.
Using with a Dispatch Queue
commBus devices support dispatching callbacks. You can construct a i2c::master instance with a dispatcher function:
If a dispatcher has been configured, callbacks will be invoked on the dispatch thread instead of the i2c::master's local thread. We recommend using dispatchers when possible for improved responsiveness.
Member Typedef Documentation
◆ cb_t
| using embvm::i2c::master::cb_t = stdext::inplace_function<void(i2c::op_t, i2c::status)> |
Represents the type of the callback operation.
◆ sweep_cb_t
| using embvm::i2c::master::sweep_cb_t = stdext::inplace_function<void(void)> |
◆ sweep_list_t
| using embvm::i2c::master::sweep_list_t = etl::vector<uint8_t, 128> |
Constructor & Destructor Documentation
◆ master() [1/4]
|
inlineexplicitprotectednoexcept |
Default constructor.
Initializes the i2c::master device with a generic name and optional dispatcher.
- Parameters
-
dispatcher The functor which callbacks will be dispatched to. This will often be paired with a dispatch queue. Example:
◆ master() [2/4]
|
inlineexplicitprotectednoexcept |
Construct an I2C master with a C-string name.
Initializes the i2c::master instance with a name and optional dispatcher.
- Parameters
-
name C-string name for the I2C master instance. dispatcher The functor which callbacks will be dispatched to. This will often be paired with a dispatch queue. Example:
◆ master() [3/4]
|
inlineexplicitprotectednoexcept |
Construct a I2C master with a std::string name.
Initializes the i2c::master instance with a name and optional dispatcher.
- Parameters
-
name std::string name for the I2C master instance. Note: i2c::master() uses a std::string_view, so the std::string must remain valid dispatcher The functor which callbacks will be dispatched to. This will often be paired with a dispatch queue. Example:
◆ master() [4/4]
|
inlineexplicitprotectednoexcept |
Construct a I2C master with a std::string_view name.
Initializes the i2c::master instance with a name and optional dispatcher.
- Parameters
-
name std::string_view name for the I2C master instance. Note: i2c::master() uses a std::string_view, so the original string must remain valid dispatcher The functor which callbacks will be dispatched to. This will often be paired with a dispatch queue. Example:
◆ ~master()
|
overrideprotecteddefaultnoexcept |
Default destructor.
Member Function Documentation
◆ baudrate_()
Implemented in nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >, test::i2cTestDriver, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, embvm::i2c::activeMaster< 128 >, and embdrv::aardvarkI2CMaster.
◆ configure()
|
inlinevirtualnoexcept |
Configure the I2C bus.
Configures the I2C bus for operation and sets the target baud rate and pull-ups.
Derived classes must implement the configure_() function to set up the target hardware.
- Parameters
-
baud The target baudrate (as an i2c::baud enumeration rather than integral Hz). TODO: Tolerance - allowed relative tolerance for the resulting baudrate pull The pullup setting, which defaults to external pull-ups (in hardware).
References configure_(), and pullups().
Referenced by embvm::i2c::activeMaster< 128 >::configure_(), and FWDemoSimulatorHWPlatform::init_().
◆ configure_()
|
protectedpure virtualnoexcept |
Configure the I2C bus for operation.
This function is implemented by the derived class. It is responsible for configuring the target hardware for operation.
- Parameters
-
pullups The target pull-up configuration.
Implemented in test::i2cTestDriver, nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, embdrv::aardvarkI2CMaster, nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, and embvm::i2c::activeMaster< 128 >.
Referenced by configure().
◆ DriverType()
|
inlinenoexceptinherited |
Returns the registered type ID of the driver.
When using DriverBase interfaces, clients can retrieve the registered driver type in order to up-cast to the correct interface.
The type is returned as a embvm::DriverType_t rather than a embvm::DriverType enum to work with custom user-defined types. Enforcing a embvm::DriverType return value would prevent clients from defining and using their own custom types.
- Returns
- the registered driver type as a embvm::DriverType_t value
References embvm::DriverBase::type_.
◆ name()
|
inlinenoexceptinherited |
Provides a string_view reference of the driver name.
- Returns
std::string_viewref containing the driver name.
References embvm::DriverBase::name_.
◆ name_cstr()
|
inlinenoexceptinherited |
Provides a c-string version of the driver name.
- Returns
- c-string containing the driver name
References embvm::DriverBase::name_.
◆ operator++()
|
inlinevirtualnoexceptinherited |
Increment operator is a no-op, but is used for iterator compatibility.
◆ pullups() [1/2]
|
inlinenoexcept |
Configure pull-ups.
- Parameters
-
pullups The target pull-up setting.
- Returns
- The configured pull-up setting.
References pullups_, and setPullups_().
Referenced by embvm::i2c::activeMaster< 128 >::setPullups_().
◆ pullups() [2/2]
|
inlinenoexcept |
Check the pull-up configuration.
- Returns
- The configured pull-up setting.
References pullups_.
Referenced by configure(), nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >::setPullups_(), and nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >::setPullups_().
◆ restart()
|
inlinenoexceptinherited |
Restart the driver.
Calls stop() and then start() on the driver. If the driver is not started, then it will be started after the start() function is invoked.
References embvm::DriverBase::start(), and embvm::DriverBase::stop().
◆ setPullups_()
|
protectedpure virtualnoexcept |
Configure pull-ups.
This function is implemented by the derived class. It is responsible for configuring the target hardware to use the requested pullup setting.
- Parameters
-
pullups The target pull-up setting.
- Returns
- The configured pull-up setting.
Implemented in nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >, test::i2cTestDriver, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, embvm::i2c::activeMaster< 128 >, and embdrv::aardvarkI2CMaster.
Referenced by pullups().
◆ start()
|
inlinenoexceptinherited |
Start the driver.
If the driver is not started, call the start_() function defined by the derived class. (Template Method Pattern)
References embvm::DriverBase::start_(), and embvm::DriverBase::started_.
Referenced by NRF52DongleHWPlatform::init_(), NRF52DKHWPlatform::init_(), BlinkySimulatorHWPlatform::init_(), FWDemoSimulatorHWPlatform::init_(), FrameworkDemoSimPlatform::initHWPlatform_(), embvm::DriverBase::restart(), embvm::timer::Timer::restart(), embvm::spi::activeMaster< TQueueSize, TLock, TCond >::start_(), embvm::i2c::activeMaster< 128 >::start_(), embdrv::aardvarkSPIMaster::start_(), embdrv::aardvarkI2CMaster::start_(), embdrv::aardvarkGPIOInput< 4 >::start_(), embdrv::vl53l1x::start_(), embdrv::aardvarkGPIOOutput< 5 >::start_(), BlinkySimulatorHWPlatform::startBlink(), and FWDemoSimulatorHWPlatform::startLEDTimer().
◆ start_()
|
overrideprotectedpure virtualnoexcept |
Derived classes override the start_ method to control driver-specific startup behavior.
(Template Method Pattern)
Implements embvm::DriverBase.
Implemented in test::i2cTestDriver, embdrv::aardvarkI2CMaster, nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, embvm::i2c::activeMaster< 128 >, and nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >.
◆ started()
|
inlinenoexceptinherited |
Check if the driver has been started.
- Returns
trueif the driver is running (started),falseif not running (stopped).
References embvm::DriverBase::started_.
Referenced by embdrv::aardvarkSPIMaster::configure_(), embdrv::aardvarkGPIOInput< 4 >::get(), embdrv::aardvarkGPIOOutput< 5 >::set(), embdrv::vl53l1x::start_(), embdrv::aardvarkAdapter::start_(), and embdrv::aardvarkAdapter::stop_().
◆ state()
|
inlinenoexcept |
Check the I2C bus status.
- Returns
- the status of the I2C bus as an i2c::state enumeration.
References state_.
◆ stop()
|
inlinenoexceptinherited |
Stop the driver.
If the driver has been started, call the stop_() function defined by the derived class. (Template Method Pattern)
References embvm::DriverBase::started_, and embvm::DriverBase::stop_().
Referenced by embvm::DriverBase::restart(), embvm::timer::Timer::restart(), embvm::spi::activeMaster< TQueueSize, TLock, TCond >::stop_(), embvm::i2c::activeMaster< 128 >::stop_(), embdrv::aardvarkSPIMaster::stop_(), embdrv::aardvarkI2CMaster::stop_(), embdrv::aardvarkGPIOInput< 4 >::stop_(), embdrv::aardvarkGPIOOutput< 5 >::stop_(), FWDemoSimulatorHWPlatform::~FWDemoSimulatorHWPlatform(), and embdrv::SimulatorTimer::~SimulatorTimer().
◆ stop_()
|
overrideprotectedpure virtualnoexcept |
Derived classes override the start_ method to control driver-specific startup behavior.
(Template Method Pattern)
Implements embvm::DriverBase.
Implemented in test::i2cTestDriver, nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, embdrv::aardvarkI2CMaster, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, embvm::i2c::activeMaster< 128 >, and nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >.
◆ sweep()
|
noexcept |
Perform an I2C bus sweep to identify active devices.
The sweep function pings all I2C addresses. Devices which ACK are stored in a list and returned via callback.
- Parameters
-
[in,out] found_list Caller's memory which will contain the successfully found ping addresses [in] cb The callback which will be called to indicate that the sweep is complete. After the cb is called, found_list is valid and can be used by the caller.
References embvm::i2c::op_t::address, embvm::i2c::busy, I2C_ADDR_MAX, and embvm::i2c::op_t::op.
◆ transfer_()
|
overrideprotectedpure virtualnoexcept |
Implemented in test::i2cTestDriver, nRFi2cMaster< TTWIIndex, TSclPin, TSdaPin, TBlocking >, nRFi2cMaster< NordicTWIM0, nRFPinID< 0, 27 >, nRFPinID< 0, 26 > >, embdrv::aardvarkI2CMaster, embvm::i2c::activeMaster< TQueueSize, TLock, TCond >, embvm::i2c::activeMaster< 128 >, and nRF51i2cMaster_Blocking< TTWIIndex, TSclPin, TSdaPin >.
◆ type()
|
inlinestaticnoexcept |
Member Data Documentation
◆ name_
|
protectedinherited |
Name of the driver instance.
Referenced by embvm::DriverBase::name(), and embvm::DriverBase::name_cstr().
◆ pullups_
|
protected |
Tracks the active pull-up configuration.
Referenced by pullups().
◆ started_
|
protectedinherited |
Tracks the driver state.
True if the driver has been started, false if it has been stopped or not yet started.
Referenced by embvm::DriverBase::start(), embvm::DriverBase::started(), and embvm::DriverBase::stop().
◆ state_
|
protected |
Tracks the status of the I2C bus.
Referenced by state().
◆ type_
|
protectedinherited |
Type ID of the driver instance.
Referenced by embvm::DriverBase::DriverType().
The documentation for this class was generated from the following files:
