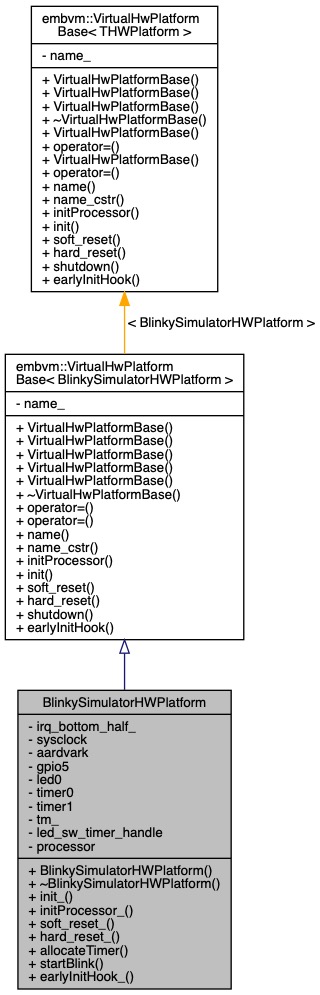
#include <blinky_simulator_hw_platform.hpp>
◆ PlatformBase
◆ TimerManager_t
◆ BlinkySimulatorHWPlatform()
| BlinkySimulatorHWPlatform::BlinkySimulatorHWPlatform |
( |
| ) |
|
|
inlinenoexcept |
◆ ~BlinkySimulatorHWPlatform()
| BlinkySimulatorHWPlatform::~BlinkySimulatorHWPlatform |
( |
| ) |
|
|
noexcept |
◆ allocateTimer()
| auto BlinkySimulatorHWPlatform::allocateTimer |
( |
| ) |
|
|
inlinenoexcept |
◆ earlyInitHook()
|
|
inlinestaticnoexceptinherited |
Perform any special initialization steps.
The earlyInitHook_() function must be implemented by the derived class as a static function.
These functions run before the C Run-time setup functions are called, and normal functionality (e.g. OS concepts) are not available.
Early initialization steps represent any super early code that needs to execute. For example, DRAM might need to be initialized before the boot process can relocate memory to its proper location in memory.
These functions are declared static to prevent you from easily using drivers within their confines
◆ earlyInitHook_()
| static void BlinkySimulatorHWPlatform::earlyInitHook_ |
( |
| ) |
|
|
inlinestaticnoexcept |
◆ hard_reset()
Perform a hard reset of the system (power cycle)
The hard_reset_() function must be implemented by the derived class.
A hard reset is intended to perform a full power cycle of the system.
Platforms which do not support a hard reset should default to calling soft_reset().
◆ hard_reset_()
| void BlinkySimulatorHWPlatform::hard_reset_ |
( |
| ) |
|
|
inlinenoexcept |
◆ init()
Initialize the hardware platform.
The init_() function must be implemented by the derived class.
Perform any hardware platform initialization steps, such as preparing peripherals for use, setting up callbacks, etc.
◆ init_()
| void BlinkySimulatorHWPlatform::init_ |
( |
| ) |
|
|
noexcept |
◆ initProcessor()
Initialize the processor.
The initProcessor_() function must be implemented by the derived class.
Perform any steps necessary for initializing the processor & processor peripheral devices for use.
Note that this is only intended to be processor initialization. Platform initialization nis handled by the init() function.
This function will likely invoke the VirtualProcessor::init() function, but the order and actual initialization process is left to the derived class.
◆ initProcessor_()
| void BlinkySimulatorHWPlatform::initProcessor_ |
( |
| ) |
|
|
inlinenoexcept |
◆ name()
Returns the Virtual HW Platform's name.
◆ name_cstr()
Returns the platform name as a cstring for C API compatibility.
◆ shutdown()
Shutdown the system.
The shutdown_() function must be implemented by the derived class.
If your platform supports shutdown capability, take the proper steps to initiate a shutdown.
If the platform does not support shutdown capability, implement your shutdown_() function as an assert to notify users trying to call this API. You could also leave the shutdown_() function undefined. Anyone who calls the shutdown() function on a platform with an undefined shutdown_() function will encounter a compiler error.
The shutdown function is not expected to return.
◆ soft_reset()
Perform a soft reset of the system (chip reset)
The soft_reset_() function must be implemnted by the derived class.
A soft reset is intended to reset the program to the beginning without performing a full power cycle.
A good strategy is to just call virtual processor's reset() function, if one is provided.
◆ soft_reset_()
| void BlinkySimulatorHWPlatform::soft_reset_ |
( |
| ) |
|
|
inlinenoexcept |
◆ startBlink()
| void BlinkySimulatorHWPlatform::startBlink |
( |
| ) |
|
|
inlinenoexcept |
◆ aardvark
◆ gpio5
◆ irq_bottom_half_
◆ led0
◆ led_sw_timer_handle
| TimerManager_t::TimerHandle BlinkySimulatorHWPlatform::led_sw_timer_handle |
|
private |
◆ processor
◆ sysclock
◆ timer0
◆ timer1
◆ tm_
The documentation for this class was generated from the following files: